

Produkter



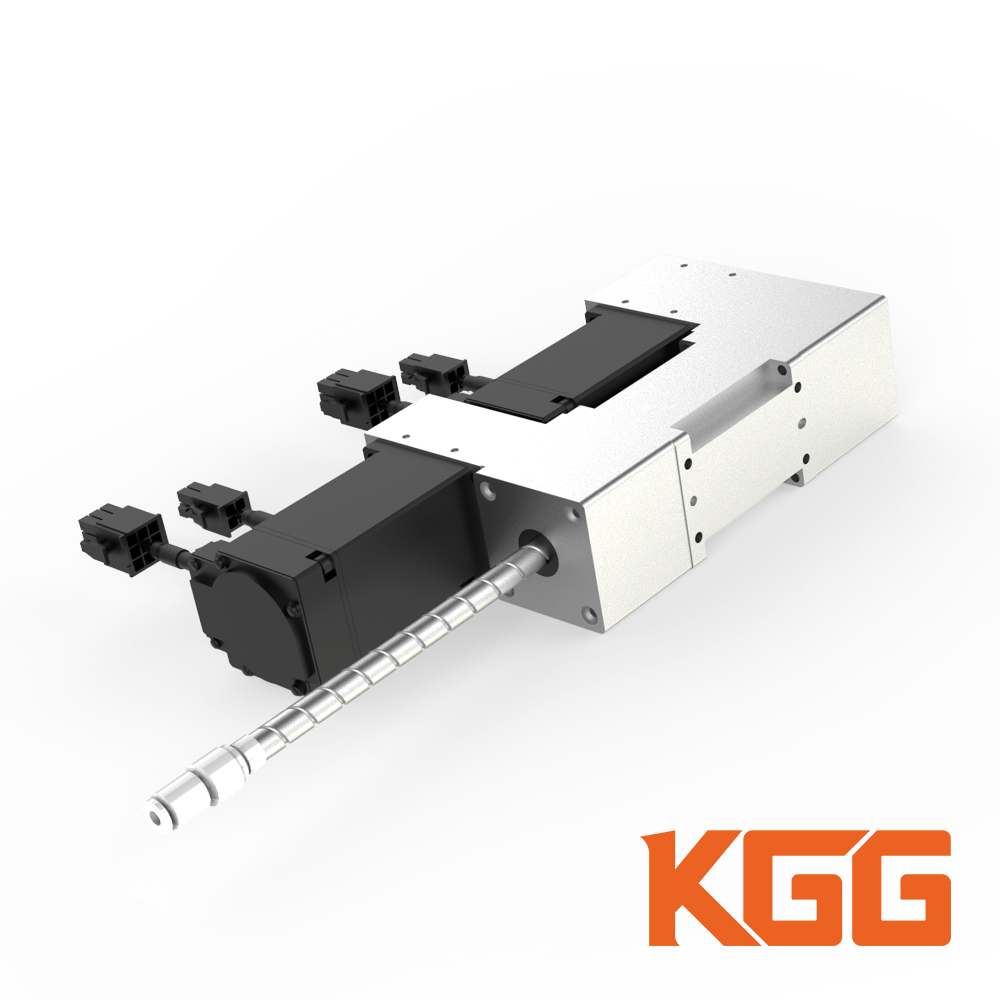


ZR-Achs Aktuator
Den ZR-Achsaktenaktuator benotzt en Hohlmotor fir d'Z-Achs unzedreiwen, fir d'Kugelschraufmutter ze rotéieren, fir eng linear Beweegung no uewen an no ënnen z'erreechen. Op deem Punkt d'Kugelsplinemutter als Stopp- a Féierungsstruktur fir d'Schraufachs ze déngen. D'Kugelschraufmutter an d'Kugelsplinemutter dréie sech mat der selwechter Geschwindegkeet an an der selwechter Richtung, fir eng In-situ-Rotatioun vun der Undriffswell ouni eng linear Beweegung no uewen an no ënnen z'erreechen. Den ZR-Wellsaktenaktuator kann mat verschiddenen Achsen benotzt ginn, fir Zäit ze spueren an eng séier Komponentenbewegung z'erreechen.
Produktvirdeeler:
01. Axial Spillraum vun 0
02. Geräischer a roueg Bewegung
03. Hybrid kompakt a liicht Konstruktioun
04. Konstruktioun vum zouenen Encoder
05. Drockkontroll méiglech

Kugelschraube mat Kugelspline
Déi ganz nei Produkter, déi d'KGG Miniatur ugewannt hunnballsBesatzung matballsPline (G-BSS), an huet dräi Funktiounen realiséiert, linear Bewegung (Z), Rotatiounsbewegung (θ) a Vakuum (V), mat engem Produkt.
Eng schlank Form gëtt realiséiert andeems een eballsBesatzung an engballsPlinndirekt an engem agebauthgielmOtor.

LinearMMotioun(z)
LinOuerMotiandeems een fuertz-Achsmden Otor an d'Dréiung vumballsBesatzungneraus. Zu dëser Zäit, denballsPlinbspillt eng Roll als Anti-Rotatiounsvorrichtung a Slide Guide vun engemsBesatzungsHaft.
Rotatioun((θ)
Dréit denballsBesatzungneraus anballsPlinnzur selwechter Zäit, déiselwecht Vitesse a Richtung, densD'Hänn dréint sech ouni sech erop an erof ze beweegen.
Vakuum (V)
BuerhDéi folgend kann fir verschidde Zwecker benotzt ginn. Zum Beispill Vakuum- a Blasfunktioun.
De superschlanke Kierper ass nëtzlech fir Plaz ze spueren wéinst der Kombinatioun aus Hohlmotor + G-BSS (Miniaturkugelschrauf mat Kugelspline).
Kee Verschleißpulver vu Riemen a Riemscheiwen wéinst der Direktantriebsstruktur.
Eng minimal Zuel vu Komponenten féiert zu engem einfachen Design a Plazspueren.
Am Fall vun engem Motor vun der Gréisst 42 sinn net nëmmen linear (Z) a rotativ (Θ;theta) Bewegungen, mä och eng Vakuumfunktioun (V) verfügbar.

---Flëssegkeetsdoséierung mat Hohlwelle
---Ëmgang mat Multiachs-Kombinatiouns-LED-Komponenten
---IC-Wafer-Wénkeljustierung
---Handyobjektivmontage
---Etikettéierung vum Handy
---DEMODDemonstrateur
Fir méi Beispiller, klickt w.e.g. op de Video hei drënner.
Dir gesitt e ganz neit Fërderbandsystem.
Et ass sou einfach wéi d'Zesummestelle vu Bausteng a kann mat enger Villfalt vun Layouttypen entworf ginn, wéi z. B. kreesfërmeg, Pist, quadratesch, komplex Offahrt, Schwéngung an Hybrid, ofhängeg vun der Betribsëmfeld.
Mat KGG ZR Achsaktuatoren, déi zesummen schaffen, ass den Transport net méi komplizéiert......
| Bild |  |  |  |  |
| Modell | ZRIN28 Typ | ZRIN42 Typ | Typ ZRFS30S | Typ ZRFS42S |
| Breet mm | 28mm | 42mm | 30mm | 42mm |
| Maximal Rees mm | 50mm | 50mm | 50mm | 100mm |
| Maximal Stousskraaft | 5N | 19N | 30N | 50N |
| Schraufdurchmesser mm | 6mm | 8mm | 6mm | 8mm |
| PDF-Download | * | * | * | * |
| 2D/3D CAD | * | * | * | * |
Dir héiert séier vun eis
Schéckt eis w.e.g. Är Noriicht. Mir mellen eis bannent engem Aarbechtsdag bei Iech zréck.
All Felder markéiert mat * sinn obligatoresch.
-

Héichpräzisiouns rostbeständeg Kugelschrauben mat héijer Bläi ...
-

Héichschmierfett fir Kugelschraube
-

Héich Steifheet Héich Genauegkeet Widderhuelbar Roller L ...
-

HST agebaute Führungsschinn Linearaktuator
-

KGG GLR Linearbewegungspräzisiounskugelschrauf mat...
-

Miniatur rostfräi Héichleeder & Héichgeschwindegkeets...
-

PT Variabel Pitch Slide
-

Schrëttmotor a Kugel- / Féierungsschrauf Extern...
-

Héich Steifheet Komplex Lasten Roueg Operatioun Balance ...
-

Uewen




